

╠ž╦╣└Ł╚╦ą╬ÖCŲ„╚╦ Optimus▓╔ė├ļŖÖC“īäėŻ¼╔Ē¾wōĒėą 28éĆł╠ąąŲ„Ż¼▓óŪę╩╣ė├ą²▐Dł╠ąąŲ„║═ŠĆąįł╠ąąŲ„ā╔ĘNĘĮ░ĖĪŻ
1Ż®╗∙ė┌¤o┐“┴”ŠžļŖÖC+ųC▓©£p╦┘Ų„+┴”Šžé„ĖąŲ„+ļpŠÄ┤aŲ„+Į╗▓µØLūė▌S│ą+ĮŪĮėė|Ū“▌S│ąĄ─ą²▐Dł╠ąąŲ„Ż╗
2Ż®╗∙ė┌¤o┐“┴”ŠžļŖÖC+ŠÄ┤aŲ„+ąąąŪØLų∙ĮzĖ▄+┴”é„ĖąŲ„+╔Ņ£ŽŪ“▌S│ą+╦─³cĮėė|▌S│ąĄ─ŠĆąįł╠ąąŲ„ĪŻ═©▀^▀Mąą╣▓ąį蹊┐£p╔┘╩╣ė├“īäėŲ„Ą─ĘNŅÉŻ¼ ─┐Ū░ Optimus ╩╣ė├ 6 ĘNł╠ąąŲ„Ż¼ą²▐D║═ŠĆąįĖ„ 3 ĘNŻ¼Ųõųąę╗┐ŅŠĆąįł╠ąąŲ„┐╔ęį┼eŲ 500 Į’ Ą─õōŪ┘
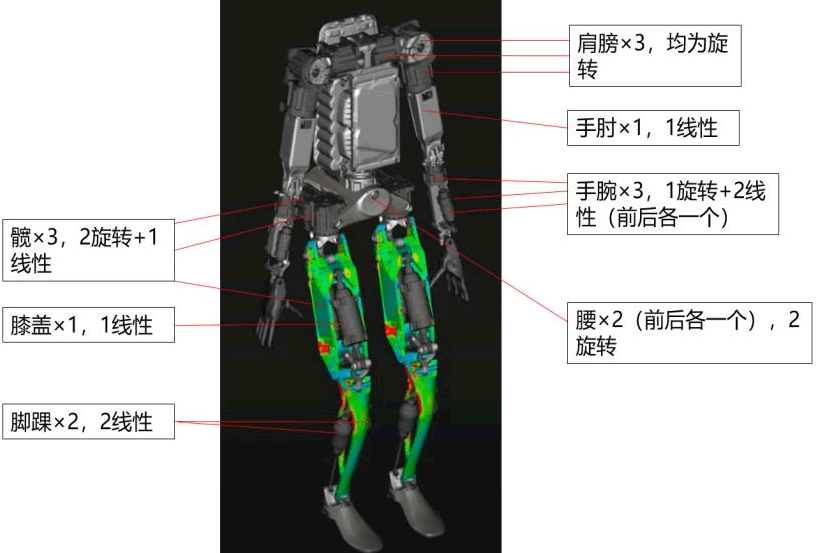
╔Ē¾wōĒėą 28éĆł╠ąąŲ„Ż¼14éĆą²▐Dł╠ąąŲ„+14 éĆŠĆąįł╠ąąŲ„ĪŻĘų▓╝╚ńŽ┬Ż║1Ż®ū¾▒█+ėę▒█Ż║ 7+7Ż¼Ųõųą╝ń▓┐ 3Ż©Ī┴2Ż®éĆą²▐Dł╠ąąŲ„Ż¼ųŌ▓┐ 1Ż©Ī┴2Ż®éĆų▒ŠĆł╠ąąŲ„Ż¼╩ų═¾ 1Ż©Ī┴2Ż®éĆą² ▐Dł╠ąąŲ„+2Ż©Ī┴2Ż®éĆų▒ŠĆł╠ąąŲ„Ż╗2Ż®ū¾═╚+ėę═╚Ż║6+6Ż¼Ųõųą¾y▓┐ 2Ż©Ī┴2Ż®éĆą²▐Dł╠ąąŲ„ +1Ż©Ī┴2Ż®éĆŠĆąįł╠ąąŲ„Ż¼Žź╔w 1Ż©Ī┴2Ż®éĆŠĆąįł╠ąąŲ„Ż¼─_§ū 2Ż©Ī┴2Ż®éĆŠĆąįł╠ąąŲ„Ż╗3Ż® č³▓┐Ż║2 éĆą²▐Dł╠ąąŲ„ĪŻ
ą²▐Dł╠ąąŲ„▓╔ė├¤o┐“┴”ŠžļŖÖC+ųC▓©£p╦┘Ų„+┴”Šžé„ĖąŲ„+ļpŠÄ┤aŲ„+Į╗▓µØLūė▌S│ą+ĮŪ Įėė|Ū“▌S│ąĄ─ĘĮ░ĖĪŻ1Ż®¤o┐“┴”ŠžļŖÖCŻ║╩╣ė├╠ž╦╣└Łūįų„čą░lĄ─ė└┤┼ļŖÖCŻ©Bespoke Permanent Magnet MachineŻ®ĪŻ2Ż®£p╦┘Ų„Ż║╩╣ė├ųC▓©£p╦┘Ų„Ż¼ĮYśŗ║åå╬Ż¼£p╦┘▒╚┤¾Ż¼é„äėŠ½Č╚║═é„äė ą¦┬╩▌^GĪŻ3Ż®╬╗ų├é„ĖąŲ„Ż║╩╣ė├ā╔éĆŻ¼╝┤ļpŠÄ┤aŲ„Ż¼░³└©▌ö╚ļ╬╗ų├ŠÄ┤aŲ„Īó▌ö│÷╬╗ų├ŠÄ┤a Ų„ĪŻ4Ż®┴”Šžé„ĖąŲ„Ż║╩╣ė├ę╗éĆĘŪĮėė|╩Į┼żŠžé„ĖąŲ„ĪŻ5Ż®▌S│ąŻ║╩╣ė├ĮŪĮėė|▌S│ąĪóĮ╗▓µØLūė ▌S│ąĪŻ
╚╦ą╬ÖCŲ„╚╦ Optimus ╔Ē¾w║╦ą─┴Ń▓┐╝■╩ął÷┐šķg£y╦ŃŻ║1Ż®ųC▓©£p╦┘Ų„Ż║å╬┼_ÖCŲ„╚╦ųC▓© £p╦┘Ų„öĄ┴┐×ķ 14 éĆŻ¼å╬ārÅ─ 2026 ─ĻĄ─ 1300 į¬Ž┬ĮĄĄĮ 2030 ─Ļ 600 į¬Ż¼2030 ─ĻśĘė^/ųąąį/ ▒»ė^ŪķŠ░Ž┬╩ął÷┐šķgĘųäe×ķ 168/126/67 ā|į¬Ż╗2Ż®ąąąŪØLų∙ĮzĖ▄Ż║å╬┼_ÖCŲ„╚╦ąąąŪØLų∙ĮzĖ▄ öĄ┴┐×ķ 14 éĆŻ¼å╬ārÅ─ 2026 ─ĻĄ─ 4000 į¬Ž┬ĮĄĄĮ 2030 ─Ļ 2000 į¬Ż¼2030 ─ĻśĘė^/ųąąį/▒»ė^ ŪķŠ░Ž┬╩ął÷┐šķgĘųäe×ķ 560/420/224 ā|į¬Ż╗3Ż®╦┼Ę■ļŖÖCŻ║å╬┼_ÖCŲ„╚╦╦┼Ę■ļŖÖCöĄ┴┐×ķ 28 éĆŻ¼ å╬ārÅ─ 2026 ─ĻĄ─ 500 į¬Ž┬ĮĄĄĮ 2030 ─Ļ 300 į¬Ż¼2030 ─ĻśĘė^/ųąąį/▒»ė^ŪķŠ░Ž┬╩ął÷┐šķgĘų äe×ķ 168/126/67 ā|į¬ĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



